
GyroEye
GyroEye 2023.2 ウェビナーでの質疑応答コーナーの内容と、アンケートでいただいたご質問への回答です。
今後のバージョンにおいてはハードウェアの進化によってジェスチャ認識の精度向上が図られたり、TS+による認識、投影方法がスタンダードになってくれば、ARマーカーの必要性は下がってくる可能性はありますが、現状のハードウェアのジェスチャ認識においては、人による誤差、明るさ等の環境要因によっても変わってくる為、手軽に安定性を高めて投影していくためには必要な技術と考えております。
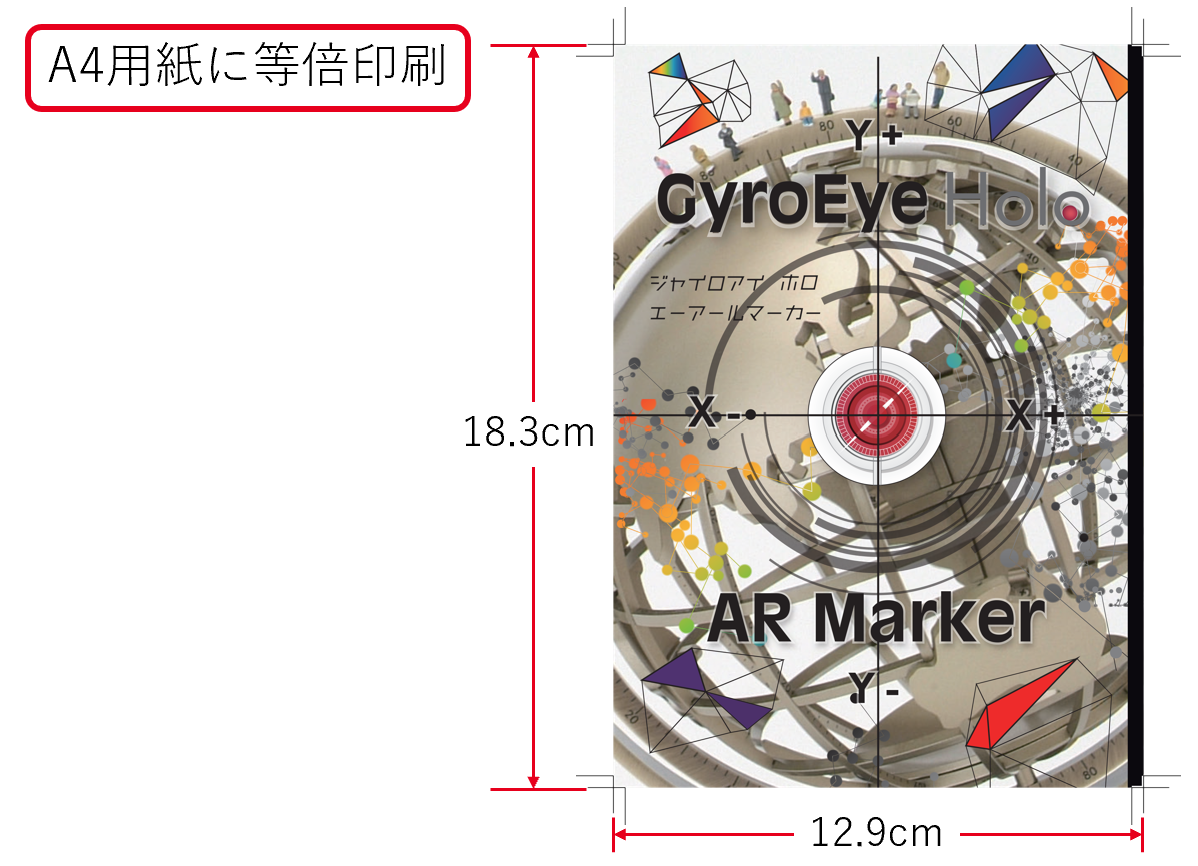
正しい精度でデータを配置するためには、ARマーカーは拡大縮小せず、等倍でA4用紙に印刷してご利用ください。
等倍印刷を行うと12.9cm×18.3cmの原寸サイズになりますので、正しく印刷できているかの目安にしてください。
現状ではご用意できかねます。
カスタマイズやご要望により、個々のお客様に応じてオリジナルのARマーカー等のご提案はできますので、ご相談ください。
現時点ではまだ対応ができておりません。次のバージョンアップにて順次検討していきます。
GyroEye 2023.2にはマーカー追従機能は搭載されておりません。今後、同等の機能ができるかどうか、検討していきたいと考えております。
透過設定機能は、2023年9月末にリリースした2023.2.3にて、実装しました。
※Webデータコンバータで取り込んだ3Dモデルや2D図面の、GyroEye Webデータコンバータ上、およびGyroEyeビューワ上での表現は、お使いのCADシステムとは同じにならない場合があります。
今後のバージョンでの実装は検討中です。
繋がりにくくなることの原因のひとつには、特に現場にあるHoloLens 2/XR10の、通信環境が不安定であることが考えられます。音声の共有はできていて映像が共有されない場合は、映像を出力するHoloLens 2/XR10側で、グラフィックメモリのリソースが足りず、映像の共有ができないこともあります。
複合的な要因が考えられますので、再度同様の現象が起こった場合は、サポート窓口へお問い合わせください。
GyroEyeサポート窓口
メールによるお問い合わせ先 https://www.gyroeye.jp/inquiry/
お問い合わせフォーム https://www.gyroeye.jp/inquiry-form/
今後のバージョンでの実装の検討を現在行っています。
ローカルデータのプロジェクトリストではフォルダを作成することができます。フォルダ機能は、GyroEye 2023.2ではローカルデータのプロジェクトリストのみで利用できる機能ですが、今後のバージョンではサーバデータのプロジェクトリストにも実装を検討しています。
透過設定機能は、2023年9月末にリリースした2023.2.3にて、実装しました。
その他、GyroEye 2021.2バージョンから移植されていない機能の実装は、2024年初春頃に発表予定のバージョンにて検討中です。
TS+は、水面が数メートル以内にあるような近い場面でのご利用にはHoloLensのセンサーが誤認識する可能性があり、TS+の能力を十分に発揮できない可能性があることをご留意ください。HoloLensの環境カメラは、前方の広範囲をトラッキングして、自己位置推定しますが、前方範囲に水面のエリアが少ない、あるいは水面は背面にあるような利用方法であれば、利用できる可能性はあります。
なお、ARマーカーについては、2021.2バージョンでは1つ、2023.2バージョンでは2つのARマーカーで投影することができますが、それを超える増設には現状対応しておりません。
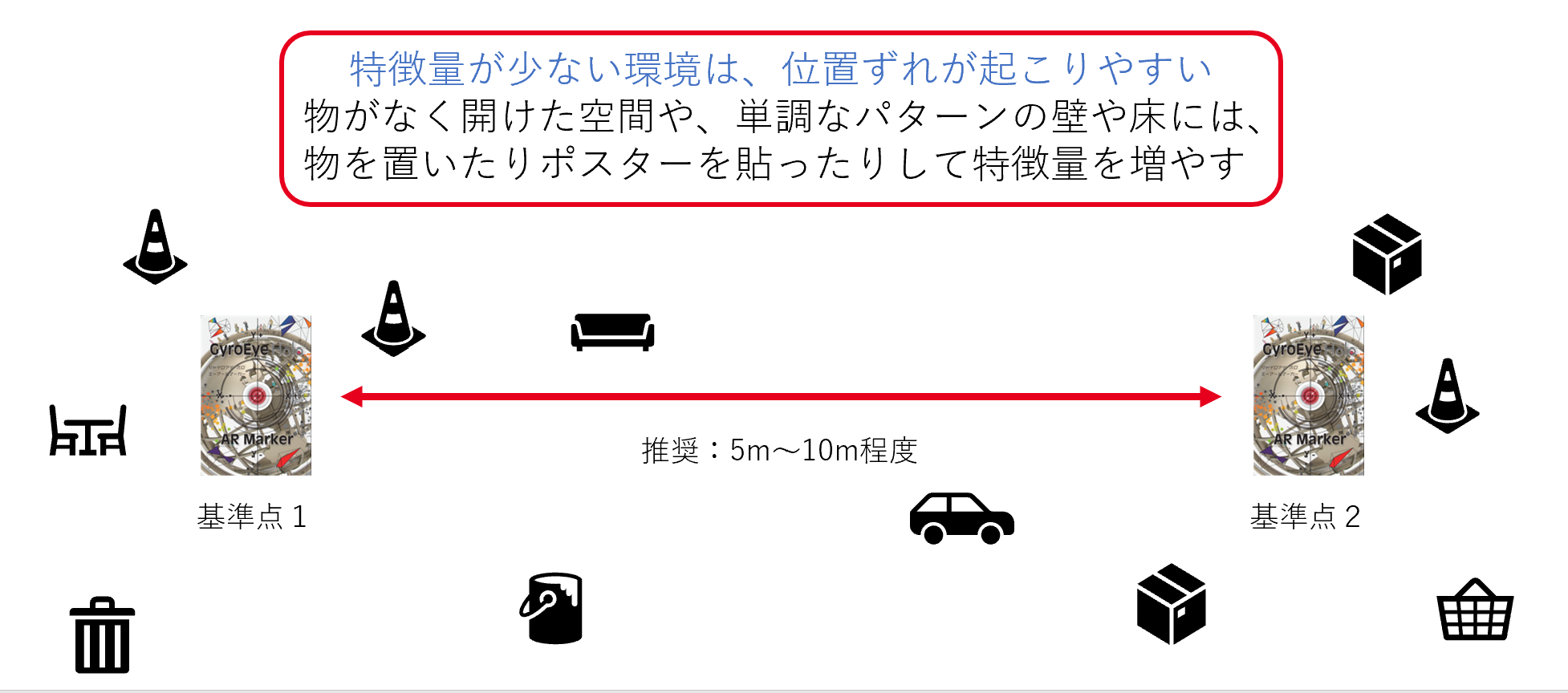
2点の基準点間の距離は、5m~10m程度を推奨しております。
また、ずれを少なくするためにも、2点の基準点間はHoloLens 2/XR10、iOS端末ともに、位置ずれが起こらない環境である必要があります。
精度上の違いはありません。
1点目から2点目まで移動する際に、より特徴量が多いパターンを想定していただくと良いかと存じます。
2点認識を行った場合、システム内部で自動的に、2点のARマーカー間の倍率を調整する機能が備わっています。2023年9月末にリリースした2023.2.3バージョンにて、どれだけ倍率を変更したかを表示する機能が実装されました。
iOS版ビューワは、手で保持して中空で確認した場合、再度その位置で再確認が難しい点や、立体的に見えないので、正確な投影位置が分かりづらいことから、精度の確認手法がHoloLens版ビューワと比べて難しく、精度を出しにくいというのはあるかと存じます。
これはHoloLens版ビューワと同様の考え方ですが、精度低下への対策としては、iOS端末のカメラに、できるだけ多くの特徴的なパターンを映しながら確認すること(壁や床だけを映し続けると、特徴量が少ない為、精度が悪くなる可能性があります)や、対象物に近付き過ぎないこと(センサーが誤認識する可能性や、対象物が近すぎると特徴量が減る為、精度悪化に繋がる可能性があります)などが考えられます。
※ここでの特徴量は、映像としてみた場合に、光の明暗が大きく変わることによる境界を特徴点として捉えるため、影や線、模様などが特徴点として内部で自動的に判定されます。システム上、特徴点が視認できるわけではありません。
認識するロジックとしては、連続的にカメラでARマーカーを認識して平均位置を割り出していますが、端末を認識途中に動かしてしまったり、光の加減や、光の反射など諸条件によっては、認識完了後のピンが立つまで時間がかかったり、ご指摘のように精度が悪く配置されるケースがあります。
その場合には、見る位置を多少変えて再認識してみるなど、お試しください。
HoloLensやiOS端末のシステムの特性上、基本的には目視での判断となることと、利用する環境、使い方によっても精度は変わることが考えられますので、具体的な精度については申し上げることができませんが、従来製品であるGyroEye 2021.2と比べて、GyroEye 2023.2では、2点認識の配置機能と動的な固定アンカー設置により、配置後の位置ずれが起きにくくなっているため、精度を出しやすいシステムにはなっています。
どちらに設置しても精度上の違いはありませんが、2点認識を使用することで1点認識を使用する時よりも精度を出しやすくなります。
具体的な精度は申し上げることが難しいですが、2点認識機能により、従来のバージョンよりも精度は出しやすくなりました。今後、実証実験や検証などを通じ、数値を突き詰めていきたいと思っています。
どのくらい向上の余地があるかは分かりませんが、今後も精度向上には引き続き取り組んでまいります。
手順としては、最初にWebデータコンバータで2点の基準点をどこに設定するか定義します。たとえば図面の交点やモデルの端点に対して、数値での入力やドラッグ操作で基準点の位置を移動するやり方ができます。
そのあと、実際に現場に行ったとき、基準点の位置にマーカーが置けないことなどが起こったら、デバイス側で基準点の位置をオフセットによりずらすことができます。XYZそれぞれ再定義ができます。
どのようにCADデータの設計をされているかにもよりますが、まだBIM/CIMの3次元データをご利用されていないという状況でしたら、まずは2次元図面の現場への重畳から始めてはいかがでしょうか?
HoloLens版ビューワを使用せず、iOS版ビューワだけを使用されているお客様もいらっしゃいます。iOS版ビューワはフリービューワですので、Webデータコンバータだけご契約いただくことで、現場や会議室でみなさまとデータの共有を行い、どのようなものを見ることができるかのご確認から始めるのもよいかと思います。
様々な使い方ができますので、いろいろな場面でご検討ください。
GyroEyeのARアプリシステムの特性上、現実空間に固定されたような形で配置がされますので、現時点では一度配置したものに対してピンチイン・ピンチアウトのような操作での拡大縮小はできません。
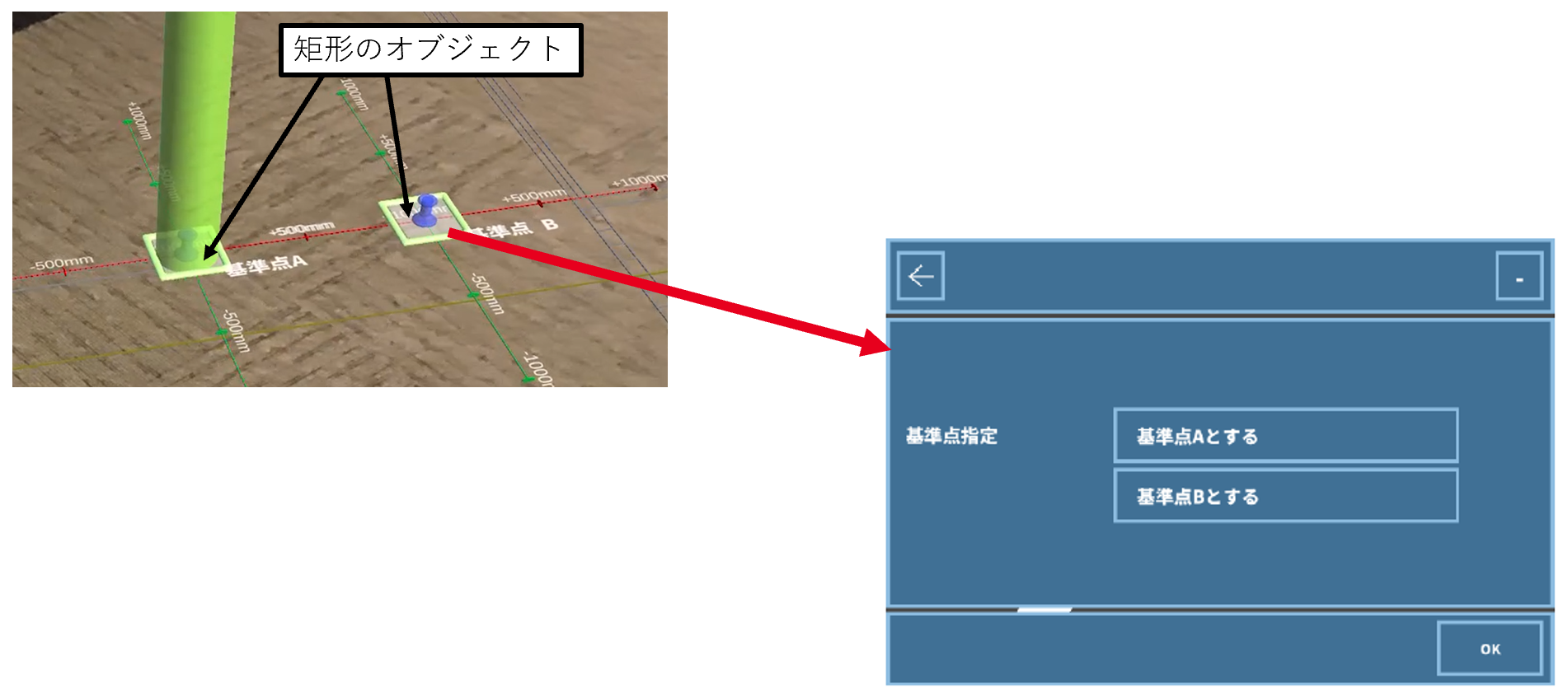
Webデータコンバータで追加した基準点を使用して配置を行う時は、ビューワのバードビューに表示されている矩形オブジェクトを選択します。
矩形オブジェクトを選択すると表示される、「基準点指定」パネルで、選択している基準点を、基準点A、基準点Bに指定することにより、Webデータコンバータで追加した基準点を使用して配置を行うことができます。
現状、アニメーションには非対応となります。デモプロジェクト等では既に取り組んでいる内容ですので、今後のバージョンアップにおいて、実装を検討していきたいと考えております。
大きさというのは実世界の大きさと推測します。
デバイスの上で表示できる範囲の制限値を設けています。現状2kmの範囲を想定しておりますので、その範囲内にある建物や構造物であればデバイスで表示される仕様となっています。(ウェビナー時には、1kmと回答申し上げましたが正しくは2kmの仕様となっておりました。ご了承ください。)
たとえば、既にある建築部材の上に設備部材を入れていくシーンの場合、設備のデータのみを配置することで、建築部材と設備部材の干渉箇所を視覚的に把握することは可能です。
それぞれバーチャルなデータの場合は、どのような形でわかりやすくデータを作成するかで見栄えが違ってくるかと思います。
調査を行いましたが、当方で同様の現象は起こりませんでした。GyroEye2023.2以降でも色やマテリアルの再現は保証していませんが、記述いただいたように特定の操作手順のみで特定の現象が発生してお困りの場合は、サポート窓口までお問い合わせください。
GyroEyeサポート窓口
メールによるお問い合わせ先 https://www.gyroeye.jp/inquiry/
お問い合わせフォーム https://www.gyroeye.jp/inquiry-form/
営業担当から体験版としての利用法など詳細をお知らせしますので、別途ご連絡ください。
お問い合わせ先
株式会社インフォマティクス XR推進室 ウェビナー担当
gyroeye-marketing@informatix.co.jp
※「@」は半角にお書き換えください。
ご利用いただける可能性はありますが、精度の問題は出てくるかと思います。デバイスの特性上、現実空間と、一度配置したデータが、永続的にずれないことはなく、使い方によってはずれが発生します。
作業場所が基準点から遠くなれば精度が悪くなります。作業場所がARマーカーを確認できる狭い範囲であれば、現実空間の基準点位置とARマーカーモデルとのずれを常にとらえながら作業を行う運用などより、より精度よく確認することが可能と考えられます。
FBXやSKP、RVTなど150MBまで変換できるフォーマットもございます。そちらのご利用もご検討ください。
ご指摘のように大きなデータであれば描画性能に負荷がかかることになりますので、追従性は悪くなることが考えられます。
一方でカメラの範囲内に映っている情報を描画する形で内部の仕組みが設計されていますので、巨大な構造物の一部しかカメラに映っていない状況下であれば追従性が悪くなることはさほどありません。原寸大で投影した時に前方にモデルがあるかないかが大きく負荷に影響されます。
変換サーバの稼働状況により検討いたします。
少なからず影響はありますが、今後も最適なデバイスを選択しながら、柔軟にプラットフォームを考えていきます。
これまでデータコンバータと各ビューワで別々に設計されていたデータが、Webデータコンバータの登場により、すべてのプラットフォームで同じデータを使用できるようになりました。これにより、他のプラットフォームへの変更をしやすくなったため、この点でも他のプラットフォームへの対応を柔軟に考えられるようになりました。
HoloLens 2/XR10は、カメラに写る手を認識しています。屋外では、HoloLens 2/XR10が手を認識しづらく、ジェスチャが反応しづらいことがあります。
HoloLens 2/XR10を屋外で使用する際、ジェスチャする手の作業服の袖を、反対の手で絞って腕のラインを出すことにより認識しやすくしたり、屋外の照明や太陽光の光によっても見え方が変わってくるため、実施する時間帯を変更したりすることで改善する可能性があります。お試しください。
屋外でも問題なく表示できますが、太陽光や屋外の光により、映像が見えづらくなることがあります。当社で販売をしている専用サンバイザーのご利用もご検討ください。
HoloLens 2 / Trimble XR10 用 サンバイザー(2枚1組) 33,000円
ご利用の状況や使い方などによって異なるため、あらためて営業担当より回答いたします。
ご質問者様以外にも気になる方がいらっしゃいましたら、個別にお答えいたします。お問い合わせください。
お問い合わせ先
株式会社インフォマティクス XR推進室 ウェビナー担当
gyroeye-marketing@informatix.co.jp
※「@」は半角にお書き換えください。
iOS端末はご存知のように、ディスプレイが単眼映像であるため、HoloLens 2/XR10のような左右のディスプレイによる複眼映像に比べると、立体感がどうしても薄れてしまいます。
HoloLens 2/XR10の場合は、左と、右のディスプレイにそれぞれ装着者の目の位置に合わせて(IPD)自動的に視差映像を作ることで、立体的に投影しております。




